Servo موتور چیست و استفاده از کتابخانه ی آن در آردوینو از مواردیست که در این قسمت شما با آن آشنا می شوید. همچنین با ترانزیستور نوع npn به صورت ابتدایی آشنا خواهیم شد. با انجام چند پروژه طریقه استفاده از دستور for را نیز یاد می گیریم.
ترانزیستور npn :
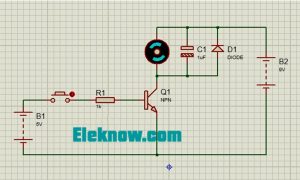
یک ترانزیستور دارای سه منطقه ناخالص می باشد. امیتر، بیس، کلکتور. وقتی به بیس ولتاژی بیش از 0.7 ولت اعمال کنیم اتصال بین کلکتور و امیتر هم وصل می شود. یکی از دلایل استفاده از ترانزیستور این است که جریان کلکتور خیلی بیشتر از جریان بیس می باشد. برای همین از یک ترانزیستور برای روشن کردن سروو موتور استفاده می کنیم تا از برد ما جریان نکشد و باعث خرابی برد نشود.
Transistor Test
(…;….;…)for :
دستور for یک حلقه ی تکرار شونده که دارای شرط را ایجاد می کند. دستوراتی که در کروشه ی بعد از آن می آید را تا بر قراری شرط تکرار می کند.
ساختار اصلی for از سه قسمت تشکیل شده است.
for(عملیات ریاضی;شرط;مقدار دهی اولیه){……}
در قسمت مقداردهی به متغیری که قرار است شرط روی آن اجرا شود مقداری می دهیم. می توان نوع متغیر را هم در آنجا مشخص کرد. هم می توان قبل از for نوع متغیر را تعریف کرد. قسمت مقداردهی اول از همه و برای یکبار اجرا می شود.
قسمت شرط در هر بار اجرای حلقه چک می شود. اگر شرط درست باشد عملیات ریاضی انجام می شود. سپس دستورات داخل حلقه اجرا می شود. متداولا دوباره شرط چک شده و عمیلات ریاضی و دستورات داخل حلقه اجرا می شود. تا وقتی که شرط بر قرار باشد به همین منوال حلقه ی for اجرا می شود.
نمونه هایی از عملیات ریاضی:
i++ , i– , i=i*2 , i=i+x
Servo موتور:
Servo یک موتور یکپارچه تشکیل شده از دنده و شفت می باشد. کنترل دقیقی روی حرکت شفت خود دارد. سروو های استاندارد اجازه گردش و قرار گرفتن در زاویه های مختلف را به شفت می دهد. معمولا بین 0 تا 180 درجه قابلیت گردش دارد. همچنین قابلیت تنظیم سرعت های مختلفی را داراست.
کتابخانه Servo از بیش از 12 موتور در بیشتر بردهای آردوینو پشتیبانی می کند. در برد مگا این تعداد به 48 نوع سروو می رسد.

arduino Servo
سروو سه سیم دارد: +5 ، 0 ، سیگنال. سیم قرمز برای اتصال به 5 ولت می باشد. سیم زمین یا منفی مشکی یا قهوه ای می باشد. سیم سیگنال معمولا زرد، نارنجی یا سفید است که به یک پین آردوینو وصل می کنیم. توجه داشته باشید که سروو جریان زیادی می کشد. اگر می خواهید که از چند سروو استفاده کنید از برد آردوینو ولتاژ تغذیه ی سروو را تامین نکنید. اگر 5 ولت را از منبع دیگری تامین گردید، حتما زمین یا منفی منبع تغذیه ی سروو و برد آردوینو یکی شود و اتصال داده شوند. در غیر اینصورت کار نخواهد کرد.
برای استفاده از کتابخانه سروو در اول برنامه باید آن را فرا بخوانیم.
#include<Servo.h>
بعد در ادامه یک متغیر از نوع سروو تعریف می کنیم. مثل زمانی که یک متغیر int تعریف می کنیم. معمولا یک اسم برای آن می گزارند. مثلا:
int x;
servo MyServo;
MyServo یک متغیر از نوع سروو می باشد.
دستورات سروو:
()attach :
متغیر ما را که از نوع سروو است را به یک پین الصاق می کند.
MyServo.attach(9);
متغیر MyServo را که قبلا تعریف کرده بودیم را به پین 9 می چسباند.
()write :
به سرووی ما یک مقدار می دهد. در سرووهای استاندارد این مقدار زاویه ایست که می خواهیم شفت به آن درجه حرکت کند. زاویه از 0 تا 180 درجه می باشد.
MyServo.write(80);
سرووی ما را به زاویه ی 80 درجه می برد.
()read :
زاویه ای که شفت سروو در آن قرار دارد را به ما بر می گرداند.
MyServo.read();
()attached :
چک می کند که آیا سروو به پایه ای الصاق شده است یا نه. اگر درست باشد True بر می گرداند، اگر نه که False بر می گرداند.
()detach :
سروو را از پینی که به آن الصاق شده است جدا می کند. وقتی تمام سروو ها جدا شدند می توان از پین 9 و 10 برای PWM استفاده کرد.
سلام.خواستم بابت وبسایت خوبتون ازتون تشکر
کنم و امیدوارم باعث ایجاد انگیزه براتون بشه